1.利用仿生獸的機構原理,利用到行走機構上,並採用3D列印將成品印製出來.
在學期初,老師有交代每組要做出一台四足行走機構,且要想辦法使其能夠行走。 於是大家不眠不休地討論 、研究、尋找還有後來專業的畫圖跟列印。才有今天的四足行走機構!
工作分配:
40423105:利用vrep模擬機構,撰寫行走程式,利用onshape協統畫圖
40423119:利用vrep模擬機構,利用onshape協統畫圖
40423128:利用vrep模擬機構,利用onshape協統畫圖
40423130:組裝,給予意見,利用onshape協統畫圖
40423133:組裝,給予意見,利用onshape協統畫圖
40423137:繪製零件圖檔,組裝,製作動畫,零件3D列印,利用onshape協統畫圖
40423144:組裝,給予意見,製作網頁,利用onshape組裝零件
40443111:組裝,給予意見,利用onshape協統畫圖
利用onshape共享功能將行走機構零件繪出
onshape共享設定
AG1_onshape協統設定 from 40423105 on Vimeo
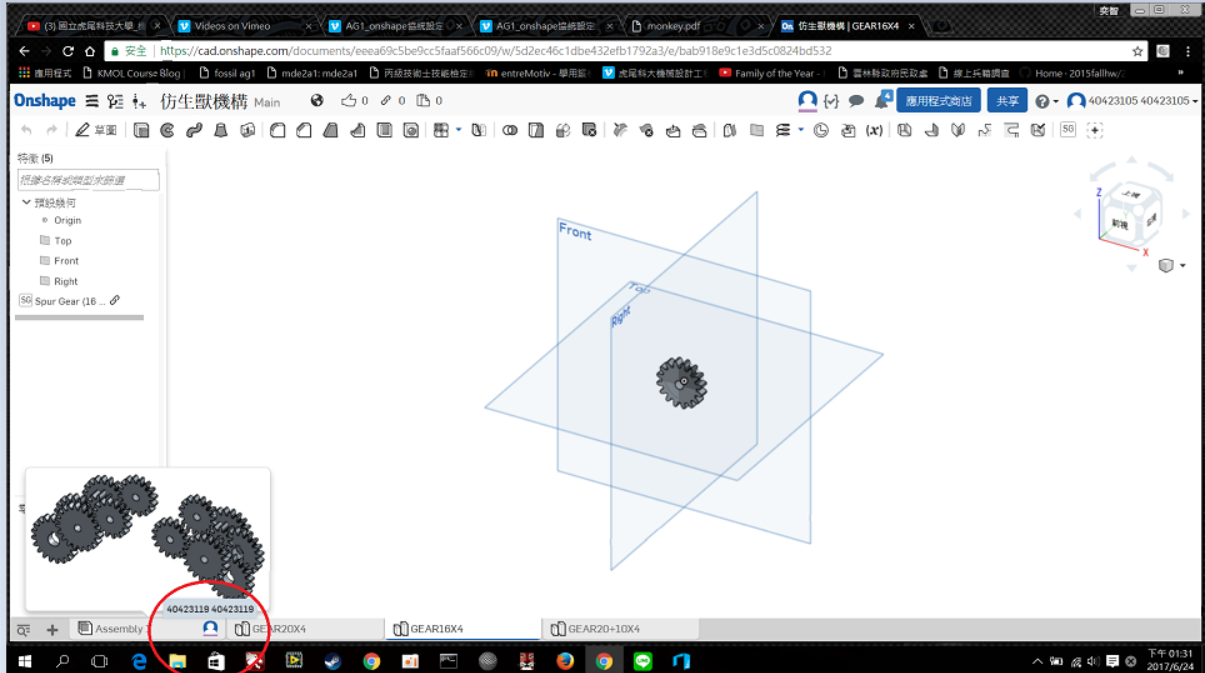
上圖可看到當其他隊友正在繪製時,自己也可看到
onshape各組員繪圖影片
40423105
繪製本體1
繪製本體2
繪製本體3
40423119
繪製本體4
繪製連桿1
繪製連桿2
40423128
繪製連桿3
繪製連桿4
繪製連桿5-1
40423130
繪製連桿5-2
國立虎尾科技大學_機械設計工程系_設計二甲_40423130_AG1 協同繪圖 仿生獸 連桿5-2 from 40423130 on Vimeo.
繪製連桿6-1
國立虎尾科技大學_機械設計工程系_設計二甲_40423130_AG1 協同繪圖 仿生獸 連桿6-1 from 40423130 on Vimeo.
繪製連桿6-2
國立虎尾科技大學_機械設計工程系_設計二甲_40423130_AG1 協同繪圖 仿生獸 連桿6-2 from 40423130 on Vimeo.
40423133
繪製銷1
繪製銷2
繪製銷3
40423137
繪製齒輪及正齒輪
40423144
組裝零件
40443111
繪製偏心軸
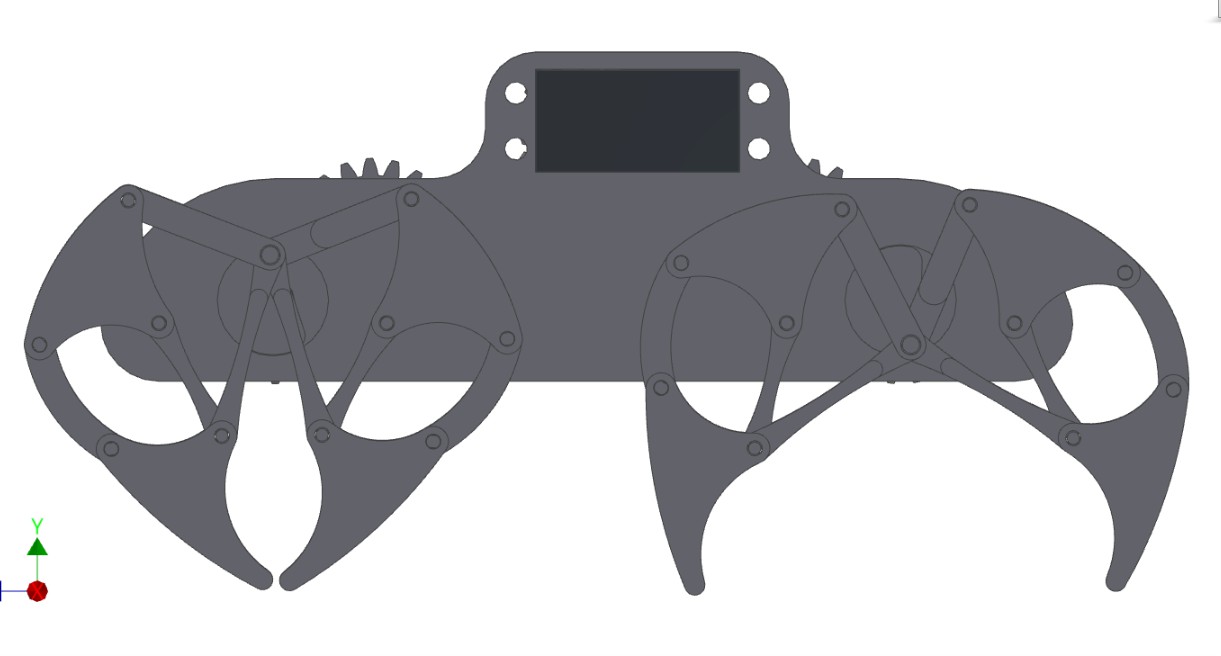
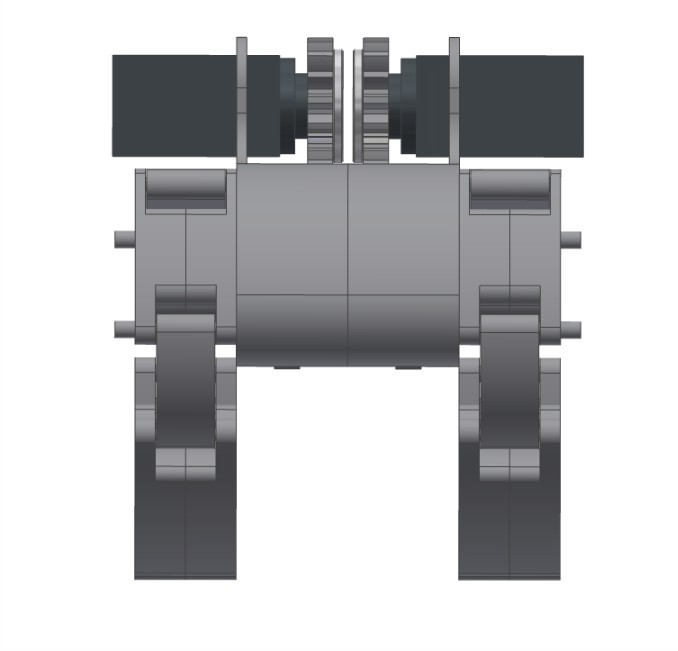
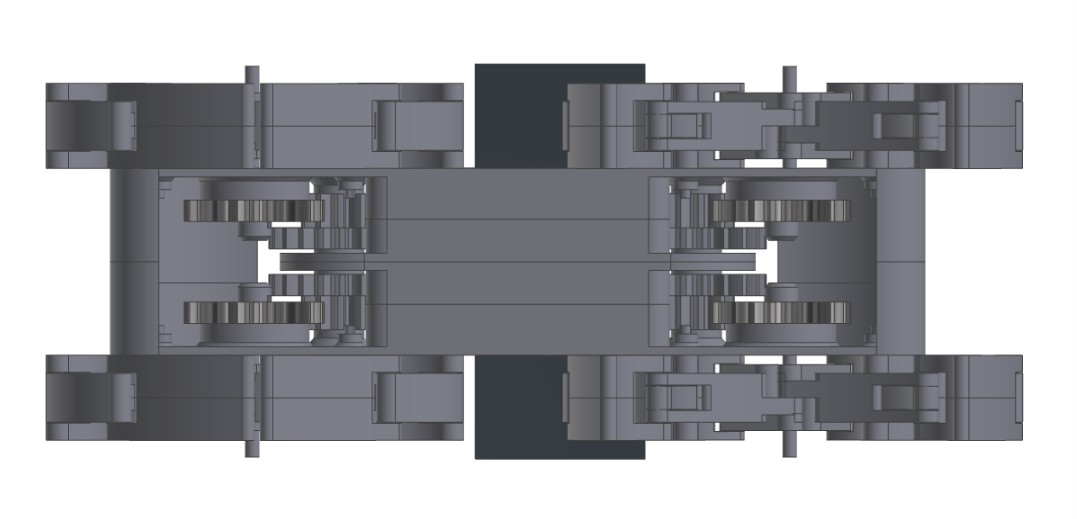
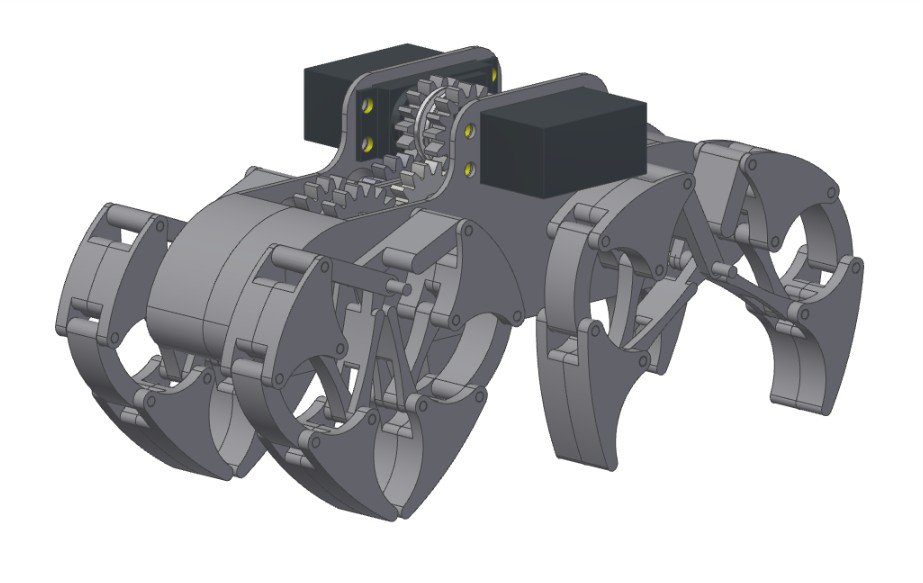
3D視圖表現
前視圖
俯視圖

右視圖
仰視圖
等角視圖
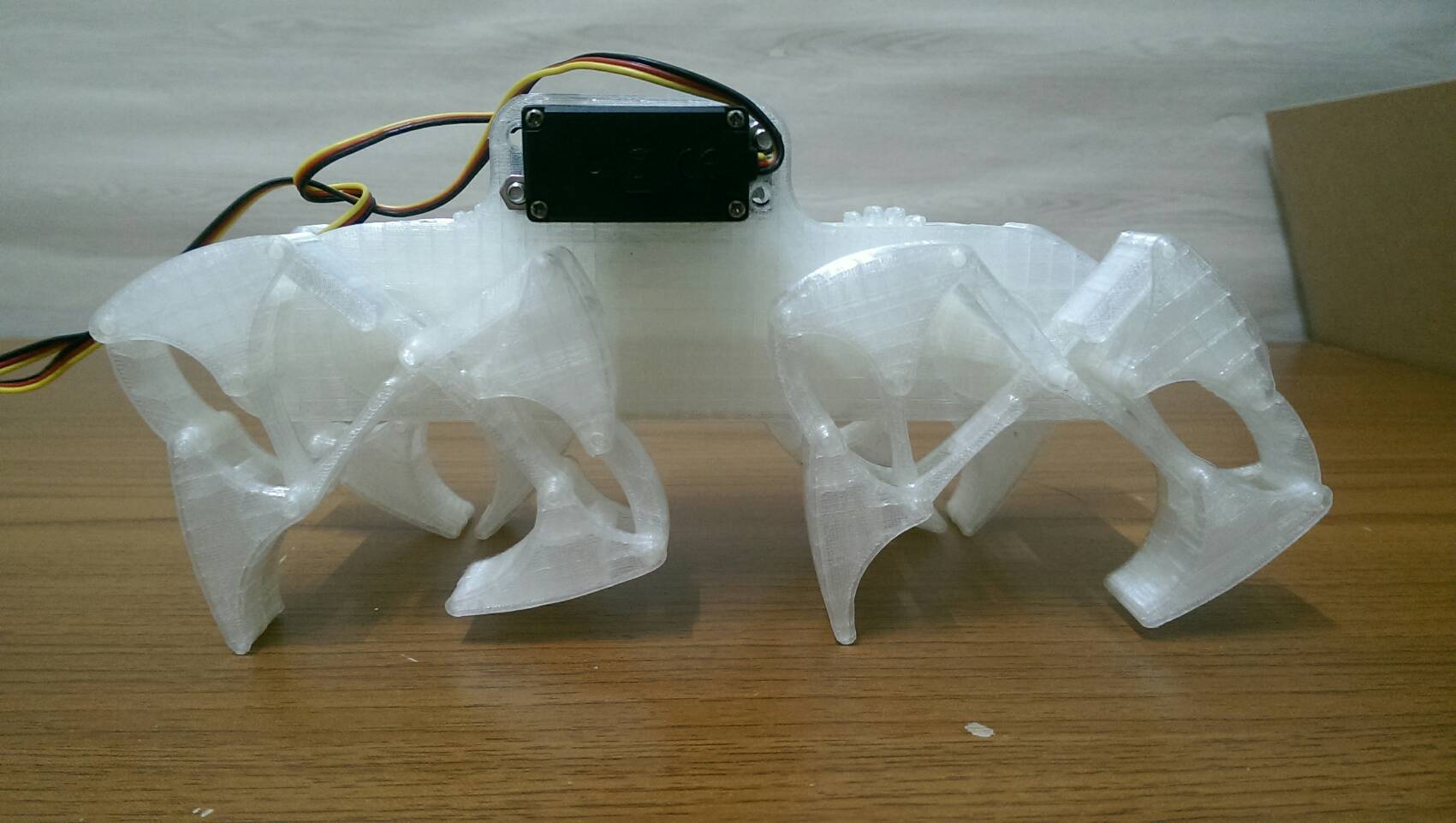
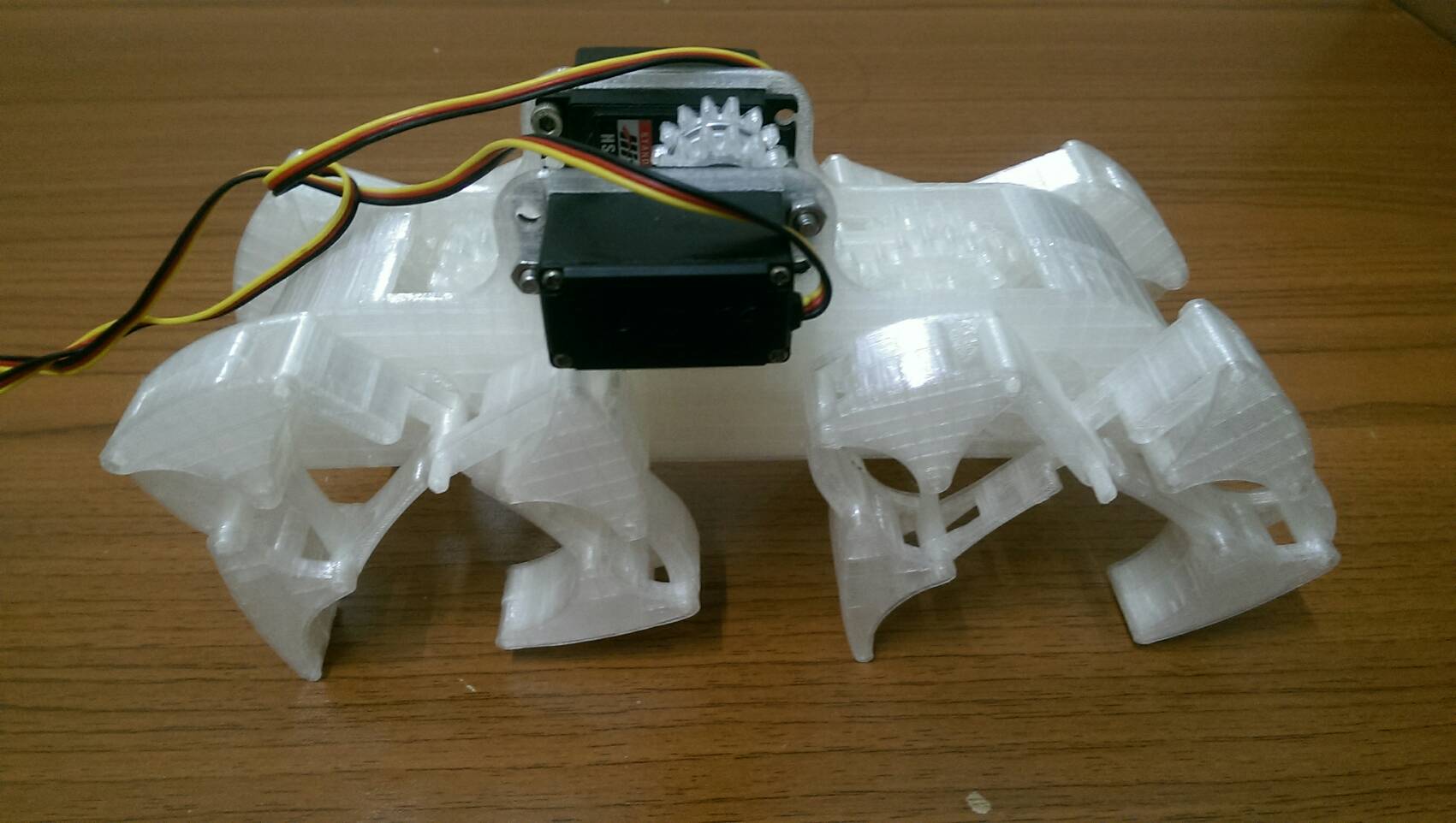
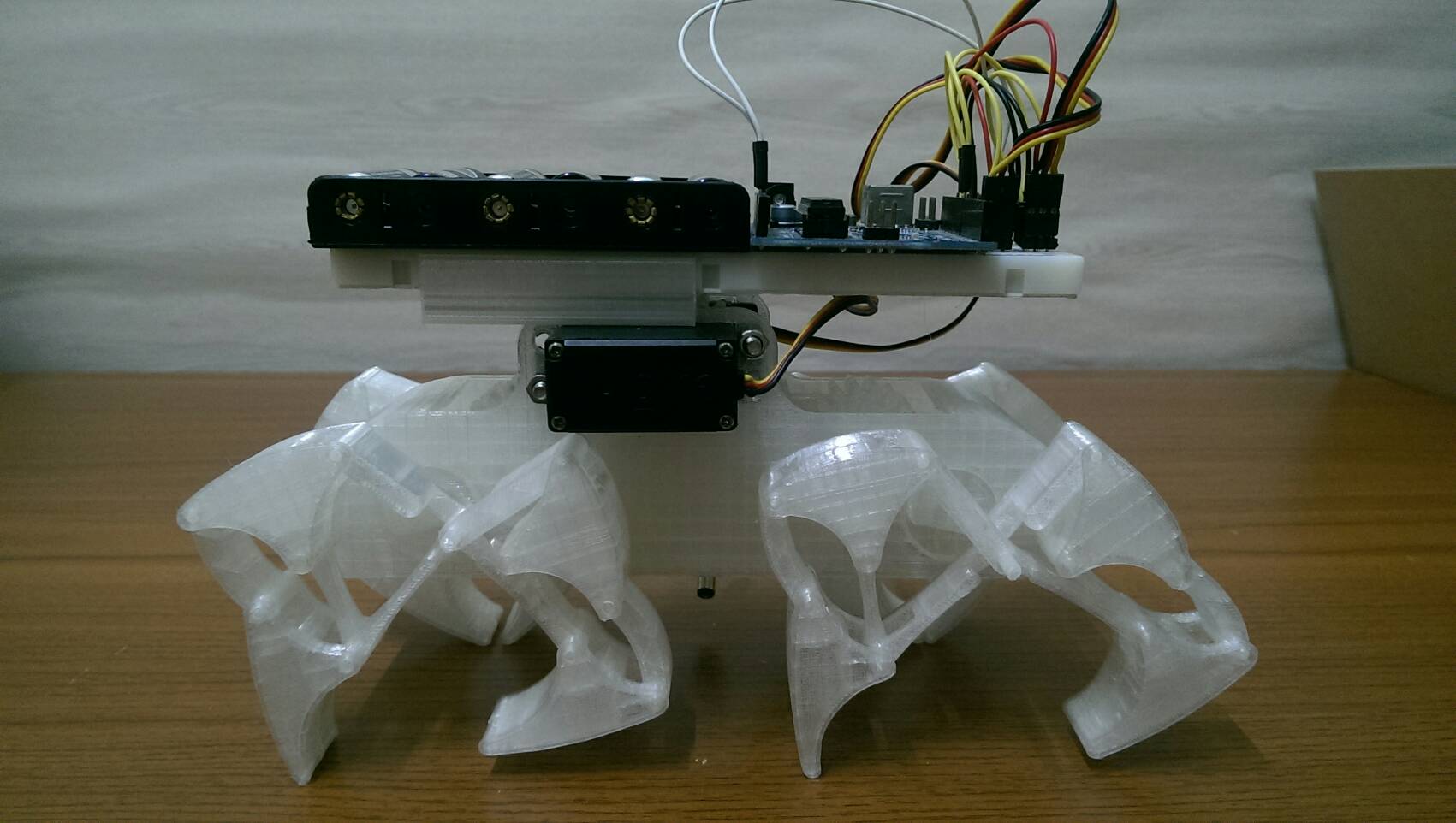
實機成品表現

實機測試影片
v-rep模擬製作影片
由於製作四隻腳的時間過久,在製作v-rep模擬先呈現製作兩隻腳的製作過程,在下方的模擬測試中會呈現模擬四隻腳
v-rep模擬測試影片
機構模擬影片
成品網頁展示
Arduino程式碼
AG1_仿生獸零組件下載區
AG1_仿生獸零件_連桿(1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(3) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(4) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(5-1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(5-2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(6-1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_連桿(6-2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_齒輪(1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_齒輪(2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_正齒輪(1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_正齒輪(2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_本體(1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_本體(2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_本體(3) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_本體(4) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_銷(1) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_銷(2) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_銷(3) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_銷(4) (請以滑鼠右鍵存檔)
AG1_仿生獸零件_偏心軸 (請以滑鼠右鍵存檔)
AG1_仿生獸組合件下載區
AG1_仿生獸組合件 (請以滑鼠右鍵存檔)
AG1_仿生獸零組件尺寸圖下載區
AG1_仿生獸零組件尺寸圖 (請以滑鼠右鍵存檔)
AG1_仿生獸V-rep動作模擬檔案下載區
AG1_仿生獸V-rep動作模擬檔案 (請以滑鼠右鍵存檔)